point cloud matching
- 6自由度位姿估计的传统方法
- surface matching in opencv
- 6D pose estimation 知乎专栏
- meiqua-github
- ork-ros package
- a tutorial on the revelent things
Coarse to fine registration:
- coarse registration
- 模板匹配
- linemode
Hinterstoisser S, Holzer S, Cagniart C, et al. Multimodaltemplates for real-time detection of texture-less objects in heavily clutteredscenes[C]// International Conference on Computer Vision. IEEE Computer Society,2011:858-865. ref1 ref2 code: shape_based_matching
- linemode
- 基于点对
- ppf
- 基于描述子
- 霍夫森林(vote based) > Recovering 6D Object Pose and Predicting Next-Best-View in the Crowd
- end to end
- 模板匹配
- refine registration
- ICP
- NDT > 1. NDT 配准方法介绍 > 2003: The normal distributions transform: a new approach to laser scan matching > 2012: MSKM-NDT Scan registration with multi-scale k-means normal distributions transform > 2013: SGC-NDT 3D scan registration using the Normal Distributions Transform with ground segmentation and point cloud clustering
prepare a model
- .stl(solidworks) --> .obj(meshlab) --> ply --> pcd
- .stl(solidworks) --> .obj() --> (sample).pcd
Association Implementation Optimization
-
KD-tree: The association solver deals with the Nearest Neighbor (NN) problem, which typically has a complexity of O(nm) where n and m are respectively the number of elements in the reading and in the reference. This stage is generally the most time-consuming and a lot of papers present variations of NN search to reduce its complexity. Then KD-tree is used to reduce the search complexity to $O(n\log m)$ after a $O(m \log m)$ building phase. KD-trees provide very little acceleration for high dimension vectors like the ones used for image based descriptors.
-
Cascade systems:
- compute ICP several times while varying the resolution from coarse to fine.
4pcs
ref
4pcs
- Ransac: > 分别在点集PP和点集QQ中任意选取三个点来组成一个基础关联对 > 计算这个关联对的旋转矩阵TiTi > 计算点集PP中处在点集QQ中的点δδ距离内的点的个数kiki > 如果kiki足够大,则认为kiki是个好结果,否则重读以上步骤 > 这个过程将被重复LL次,选取最高的kiki作为最后的结果
- Randomized Alignment > 在点集P中随机选取一个base,计算在点集Q中所有有可能的bases,得到旋转矩阵. > 验证配准: 先验证部分点集重合, 验证剩余点 > 本算法中提出基于4PCS的base:planar congruent 4-points sets
- congruent 4-points: 在一定误差允许范围内可以通过刚体变换配准
- affine-invariant 4-points: 仿射不变,因此属于congruent 4-points
ANN: approximate nearest neighbor - benchmark > http://ann-benchmarks.com/ - ref1-zhihu - ref2-hnsw学习笔记 - ann library - search example
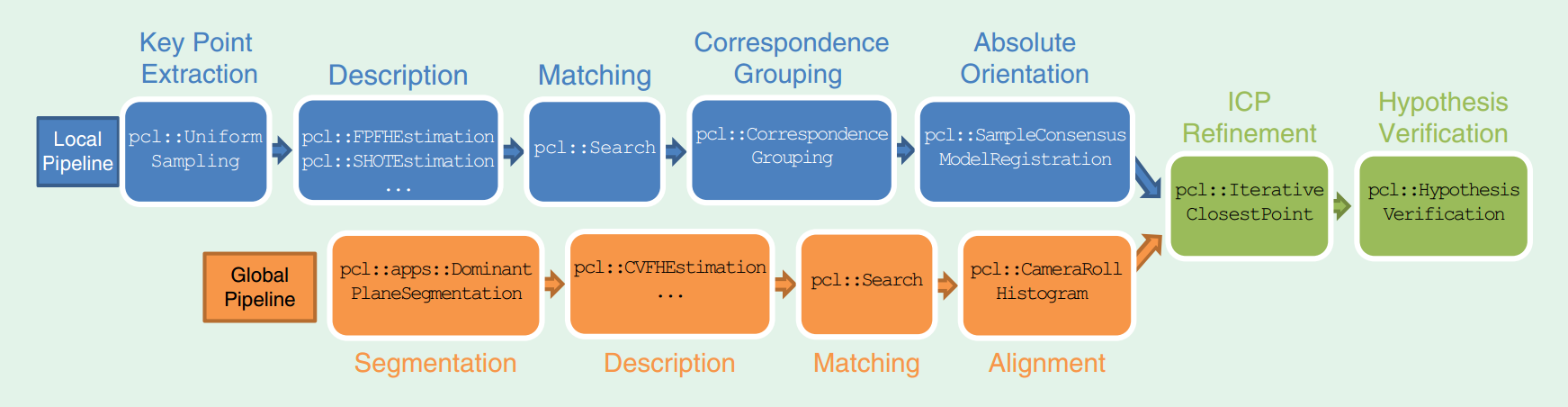
3D object recognition and 6D pose estimation based on descriptor
Point Cloud Library: Three-Dimensional Object Recognition and 6 DoF Pose Estimation A Comprehensive Performance Evaluation of 3D Local Feature Descriptors
local descriptor
- SHOT: Signature of Histograms of Orientation
- pcl::SHOTEstimation< ... > shot;
- FPFH: Fast Point Feature Histogram
- geometry based descriptors: PFH/VFH/FPFH
- pcl::FPFHEstimation< ... > shot;
- SC: 3D shape context
- pcl::ShapeContext3DEstimation< ...>dsc;
- USC: unique shape context
- pcl::UniqueShapeContext< ... > dsc;
- RSD: Radius based Surface Descriptor
- pcl::RSDEstimation< ... > dsc;
- SI: Spin IMages
global descriptor
- PFH: POint Feature Histogram
- pcl::PFHEstimation< ... > pfh;
- VFH: Viewpoint Feature Histogram
- pcl::VFHEstimation< ... > vfh;
- CVFH: Clustered Viewpoint Feature Histogram
- pcl::CVFHEstimation< ... > cvfh;
- ESF: Ensemble of Shape Functions
- pcl::ESFEstimation< ... > esf;
- GRSD: Global RSD
recognition pipelines