03_roadmap
YeeKal
•
•
"#"
- accessibility
- departability
- connectivity
visibility graph
connect the node if they could be seen from each other.
Visibility maps tend to apply to two-dimensional configuration spaces with polygonal obstacles.
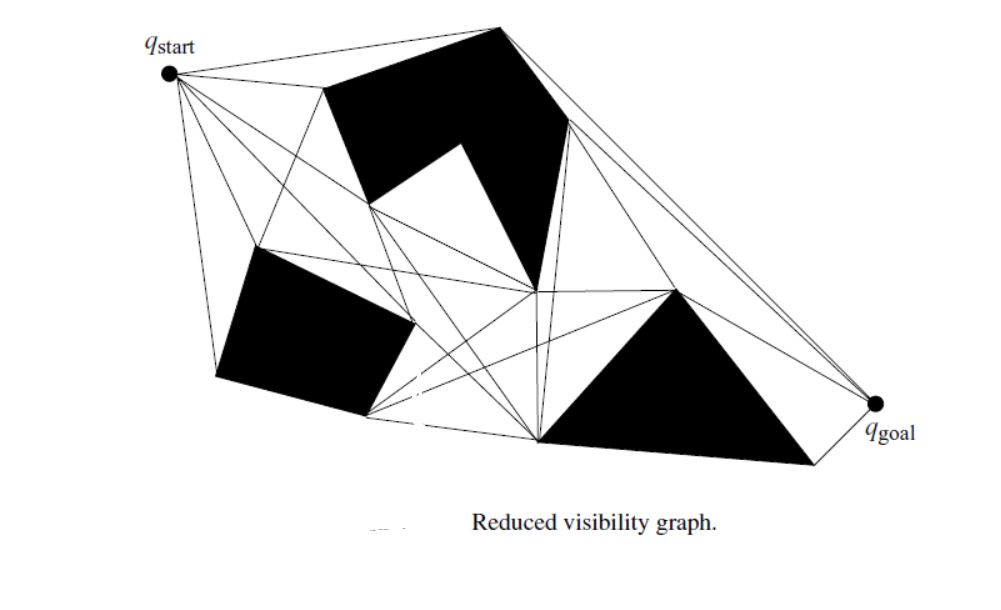
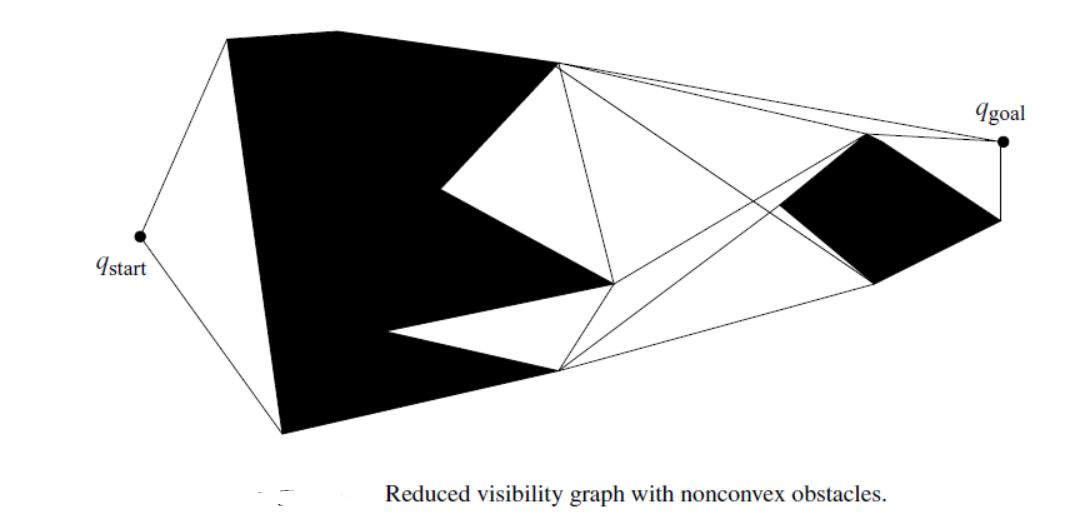
reduced visibility graph
constructed from supporting and separating lines. This approach deceases the number of edges.
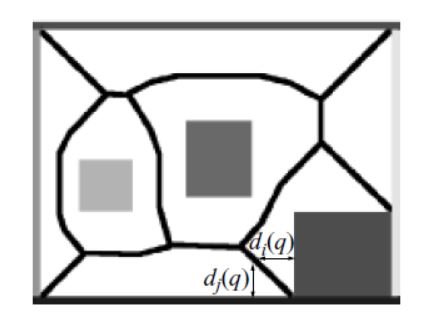
generalized voronoi diagram
The generalized Voronoi diagram is the set of tpoints where the distance to the two closest obstacles is the same.
the Rod-Hierarchical Generalized Voronoi Graph
Define a roadmap in a non-Euclidean configuration space.